2015-09-16
HORIBA排放仪在TTI小型燃油发动机(小型通机)产线测试与自动调机系统
作者:admin 点击:3754
(一)、 试验需求
该设备能够满足东莞创机TTI各类小型燃油发动机在线自动调机。
(二)、方案概述
1. 系统框图
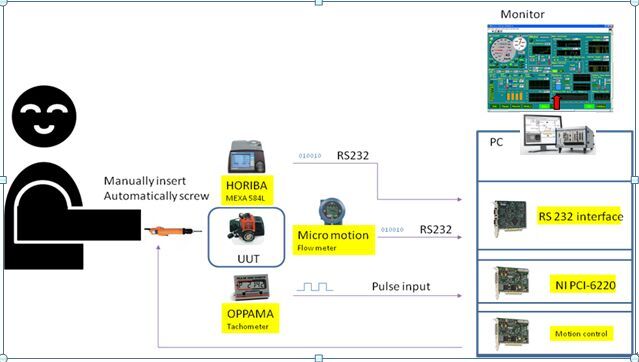
2. 设备组成:
1套 Triv AutoSET (上位机监测软件)
1个 NI PCI Daq (数据采集板卡)
1个 NI PXI (测控主机)
1个 人机界面 (显示器)
1个 TTI自备 (调试台架)
1个 TTI自备 (质量流量计)
1个 TTI自备 (HORIBA尾气分析仪)
1个 TTI自备 (转速传感器)
其它附件
3. 设备主要功能:
Ø 调机目标参数设置功能(可包含转速、油耗与排放三种不同方式)
Ø 调机过程指导功能
Ø 采集数据实时显示功能
Ø 测试参数自动保存与记录
Ø 自动控制化油器油针调机功能
Ø 远程监控功能
4. 方案优势
a) 替代人工调机,实现自动化化油器油针调节,减少人为误差,降低人工成本;
b) 整个测试工作过程流程化指导;
c) 可根据需要,选择转速、油耗与排放等三种不同方式实现自动化调机;
d) 可扩展的数据采集系统;
e) 开放式简单容易的用户编程功能。
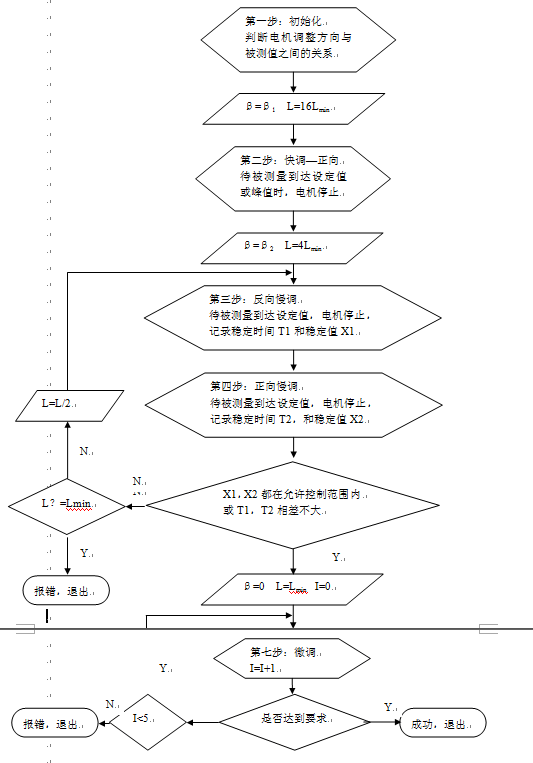
5. 设备自动调机工作原理
首先采集的数据要经过不同滤波系数的低通滤波器之后才作为后续控制的依据。
一步:初始化阶段。步进电机首先顺时针转若干角度,停止5s;再逆时针转回中点位置,停止5s;再转若干角度,停止5s。检测被测量的变化趋势,依照测得的三点数值,选择下一步步进电机的旋转方向。同时做初步判断,电机与调整针之间是否良好连接。
第二步:快调阶段(设定此时电机旋向为正向),滤波系数β取最大β1,步进电机步长L取最小值16倍Lmin
按照判断好的合适方向,步进电机以较快的速度旋转,被测量的跟随变化。待被测量到达设定值或峰值时,步进电机停止。同时检测被测量归于稳定值所需的时间。稳定时间过长或无法稳定,则提示报错,退出。
第三步,反向慢调阶段,滤波系数β取中间值β2,步进电机步长L取中间值4倍Lmin
按照第二步的相反方向,步进电机以较慢的速度旋转,被测量的跟随变化。待被测量到达设定值或峰值时,步进电机停止。同时检测被测量归于稳定值所需的时间。稳定时间过长或无法稳定,则提示报错,退出。
第四步,正向慢调阶段,滤波系数β,步进电机步长L不变
按照第三步的相反方向,也就是第二级的方向,步进电机以较慢的速度旋转,被测量的跟随变化。待被测量到达设定值或峰值时,步进电机停止。同时检测被测量归于稳定值所需的时间。稳定时间过长或无法稳定,则提示报错。
第五步,满足以下条件中的一个:
1、 第三、第四步所测得的被测量都在允许控制范围内
2、比较第三级和第四步测得的被测量的稳定时间,如果两者相差不大
则按照线性插值法或去中值法,确定目标位置。自动调整到目标位置。进入第七步
若上述两个条件都不满足,则进入第六步
第六步,慢调阶段2,滤波系数β不变,步进电机步长L取一半,重复上述第三、四步。步进电机以较慢的速度旋转,被测量的跟随变化。待被测量到达设定值,步进电机停止。同时检测被测量归于稳定值所需的时间。
满足以下条件中的一个:
1、 两次所测得的被测量都在允许控制范围内
2、比较两次测得的被测量的稳定时间,如果两者相差不大
则按照线性插值法或去中值法,确定目标位置。自动调整到目标位置。进入第七步。
若上述两个条件仍不满足,步进电机步长L再减半,重复第六步。如此时步长已调至最小,仍不能满足要求,报错退出。
第七步,微调阶段,滤波系数β取0,步进电机步长L取最小值Lmin
首先保持步进电机不动,在规定时间内测定被测值是否稳定在允许范围内,如符合要求则调机结束。否则,步进电机按所判断的方向改变一个最小步长,测被测值是否可以稳定在允许范围内。如不能满足要求,继续调整,调整5次之后仍不能满足,则报错退出。