



2023-03-13
适用于机器人系统的EtherNetIP/CANopen协议转换网关-HD67596
作者:triv 点击:445
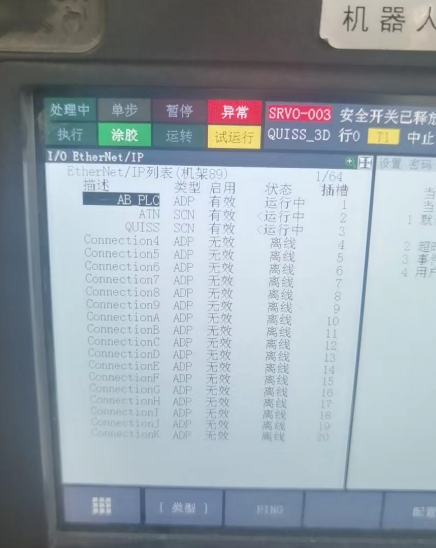
HD67596 是一种EtherNetIP / CANopen 转换器,允许将某些 CANopen 设备与 EtherNetIP 网络连接(比如 Allen Bradley PLC...) 以便在不同网络间交换信息。
-
最高能达496字节的读取和写入;
-
CANopen总线与EtherNet/IP总线之间的双向信息传输;
-
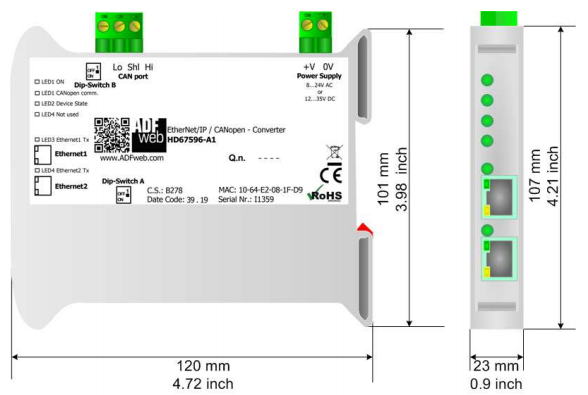
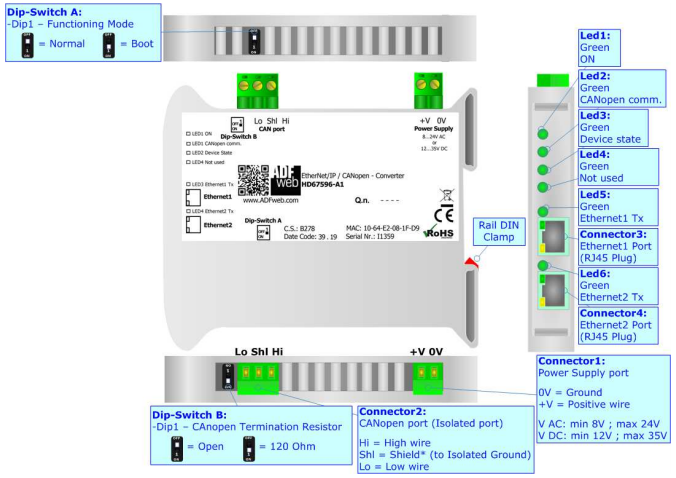
可安装在35mm导轨DIN上;
-
电源输入:8-24V AC或12-35V DC;
-
工
作温度范围:40°C-85°C。
连接示例
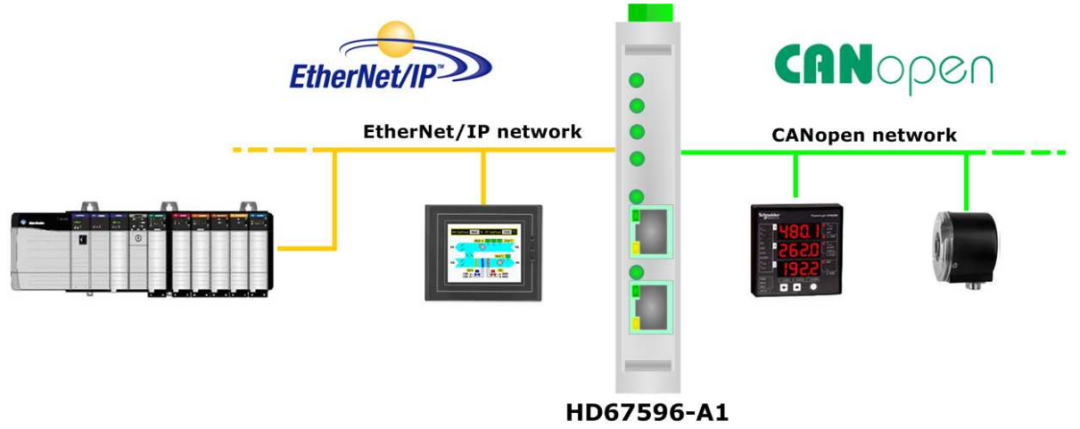
连接方案
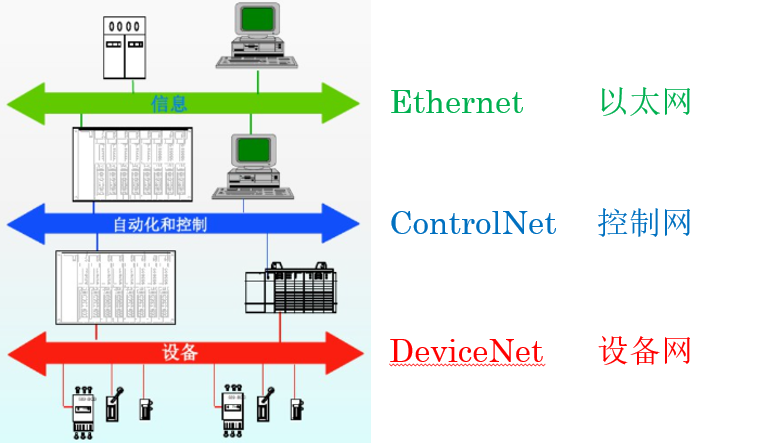
EtherNet/IP协议
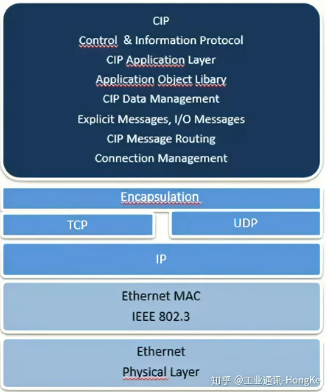
ps:显式消息被称为客户端/服务器消息,而隐式消息通常被称为I/O消息。
CANopen协议
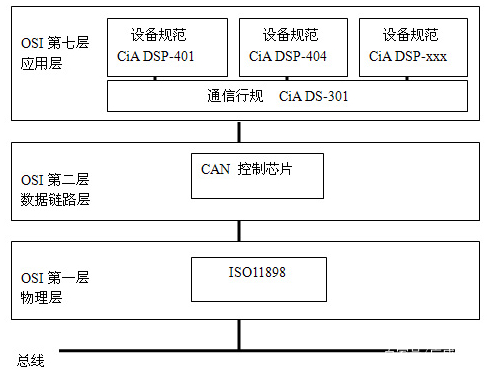
CANopen 将 CANbus 11 位元的 ID 分为 4 位元的功能码及 7 位元的 CANopen 节点 ID。7 位元的 ID 共有 128 种不同的组合,其中 ID 0 不使用,因此一个 CANopen 网络上最多允许 127 台设备。CANbus 在 CAN 2.0 B 规格中允许 29 位元的 ID,因此若配合 CAN 2.0 B 使用,CANopen 网络上可以超过127 台设备。
CANopen 将 CANbus 的 11 位元 ID 称为通讯对象 ID (COB-ID)。COB-ID 的前 4 个位元是 CANopen 的功能码,因此数值小的功能码表示对应的功能重要,允许的延迟时间较短。
服务数据对象(SDO)可用来存取远端节点的对象字典,读取或设定其中的数据。提供对象字典的节点称为SDO server,存取对象字典的节点称为SDO client。SDO 通讯一定由SDO client 开始,并提供初始化相关的参数。
过程数据对象 (PDO) 协议可用来在许多节点之间交换即时的数据。可透过一个 PDO ,传送最多 8 字节(64位)数据给一设备,或由一设备接收最多 8 字节(64位元)的数据。
-
PDO 过程数据对象-对应实际物理量的输入及输出。数据的单位可能是 RPM,V,Hz,mAmp....
-
SDO 服务数据对象-一般来说是组态设定的数据,如节点位置、节点ID、通信速度、位移、增益等。
COB-ID - CAN 对象编号
-
CAN ID - CAN Identifier. 是在每个 CAN 数据前面的信息识别码,共 11 位元
-
EDS -电子数据手册 (Electronic data sheet) 是NI 格式或XML格式的文件
-
DCF -设备配置文件 (Device configuration file)是加强版的 EDS,可以设置节点 ID 及通信速度